|
I am a PhD student in robotics at University of Michigan, Ann Arbor advised by Prof. Dmitry Berenson. I am working on dexterous robot manipulation with a multi-fingered hand. I am also an Applied Scientist Intern at Frontier AI & Robotics team at Amazon. Previously, I was a master's student in robotics (MSR) at Robotics Institute of Carnegie Mellon University, where I was advised by Prof. David Held. I was working on safe Reinforcement Learning and manipualtion with Prof. Held. Prior to Joining CMU, I was an undergraduate student at Tsinghua University majoring in Engineering Mechanics (Qian class). I was also fortunate to have a chance to be advised by Prof. Richard Voyles, Prof. Oussama Khatib, Prof. Masayoshi Tomizuka, and Prof. Huaping Liu. |

|
|
|
|
Fan Yang, Sergio Aguilera Marinovic, Soshi Iba, Rana Soltani Zarrin, Dmitry Berenson RSS 2025 workshop on Learned Robot Representations , 2025 We propose to combine an NDF-based implicit contact representation with reinforcement learning ro solve dynamic recovery tasks. Our method also demonstrate a better generalization to unseen object geometry. Keywords: contact representation, dynamic recovery, reinforcement learning [Paper] [Website] [BibTex] |
|
Abhinav Kumar, Thomas Power, Fan Yang, Sergio Aguilera Marinovic, Soshi Iba, Rana Soltani Zarrin, Dmitry Berenson International Conference on Robotics and Automation (ICRA) , 2024 We propose a diffusion-informed A* planning algorithm, that plans both contact modes and trajectories. We evaluate our method on the challenging screwdriver turning task in both sim and real Keywords: dexterous manipulation, diffusion model, motion planning [Paper] [BibTex] |
|
Fan Yang, Thomas Power, Sergio Aguilera Marinovic, Soshi Iba, Rana Soltani Zarrin, Dmitry Berenson IEEE Robotics and Automation Letters We propose a trajectory optimization algorithm, that takes into account both object and robot finger geometry, framing the contact constraints and finger rolling constraints differentiablly. Our metod also considers the extrinsic contact between the object and the environment. Keywords: dexterous manipulation, trajectory optimization [Paper] [Code] [Website] [BibTex] |

|
Fan Yang, Wenxuan Zhou, Zuxin Liu, Zhao Ding, David Held International Conference on Robotics and Automation (ICRA) , 2024 We propose an algorithm where the RL agent operates in a modified MDP, embedded with a trajectory optimization algorithm to ensure safety. Keywords: Safe RL, Trajectory Optimization, Markov Decision Process [Paper] [Code] [Website] [BibTex] |
|
Zixuan Huang, Yating Lin, Fan Yang, Dmitry Berenson International Conference on Robotics and Automation (ICRA) , 2024 We propose a diffusion model that generates subgoals dynamically in a coarse-to-fine manner, trained by random play data. Keywords: Diffusion Model, Reachability, Coarse to Fine [Paper] [Video] [Website] [BibTex] |
|
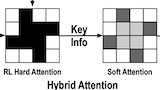
Wenxuan Zhou, Bowen Jiang, Fan Yang, Chris Paxton*, David Held* Conference of Robot Learning (Oral), 2023 We propose a spatially-grounded and temporally-abstracted action representation with a hybrid discrete-continuous reinforcement learning framework. Keywords: RL with 3D Vision, Action Representation, Contact-rich manipulation [Paper] [Code] [Website] [BibTex] |

|
Fan Yang, Wenxuan Zhou, Harshit Sikchi, David Held ICML Workshop, Safe Learning for Autonomous Driving, 2022 [BibTex] The method of graduating incurring a harder safety constraints can lead to a better performance in safe RL tasks. |

|
Fan Yang, Chao Yang, Huaping Liu, Fuchun Sun Conference on Robot Learning (CORL), 2021 [BibTex] We develop a benchmark and evaluate the state-of-the-art lifelong learning method on reinforcement learning tasks, especially robotic manipulation tasks. |

|
Fan Yang, Chao Yang, Di Guo, Huaping Liu, Fuchun Sun IEEE 11th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), 2021 [BibTex] An adversarial training algorithm is used to increase the robustness of robot joint damage. |
|
Jiachen Li, Fan Yang, Hengbo Ma, Srikanth Malla, Masayoshi Tomizuka, Chiho Choi International Conference on Computer Vision (ICCV), 2021 [BibTex] We develop a method that uses RL agent to select important interactions for trajectory prediction in a highly interactive environment. |

|
Jiachen Li*, Fan Yang*, Masayoshi Tomizuka, Chiho Choi Neural Information Processing Systems (NeurIPS), 2020 [BibTex] We develop a Graph-Neural-Network-based method captures the interactions between different agents for trajectory prediction in a highly interactive environment. |